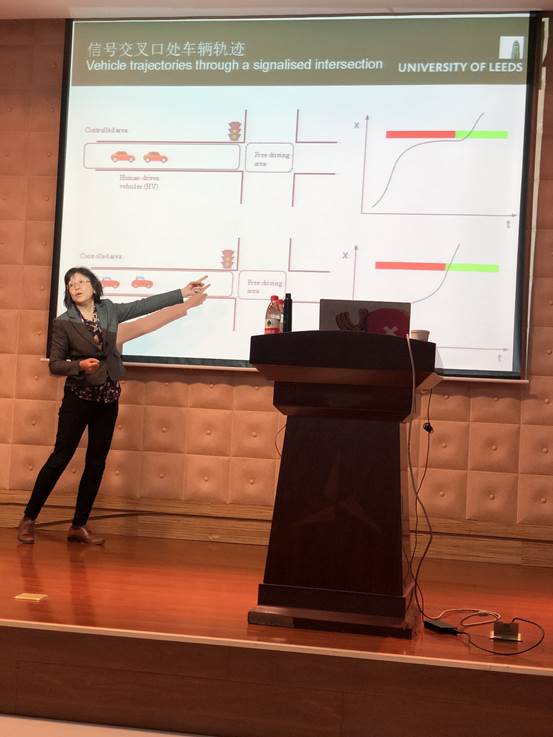
应控制理论与控制工程系史忠科教授邀请,英国利兹大学交通研究所刘蓉晖教授于2019年10月24日来公司进行了学术交流。上午十点,刘蓉晖教授在yl7703永利官网二楼报告厅开展了题为“A platoon-based cooperative eco-driving model for mixed automated and human-driven vehicles at a signalised intersection”的学术报告。相关专业教师及研究生、本科生出席了报告会。
报告主要围绕无人驾驶车辆与有人驾驶车辆混合行驶场景下,信控交叉路口的车队最优化控制问题。刘教授首先简要介绍了未来车联网环境下混行交通面临的挑战,然后具体讲解了一种以能耗最低为优化目标,车辆跟驰模型为基础,以无人驾驶车辆为头车的车队控制方法。
刘教授的报告精彩生动,现场师生对于仿真优化、跟驰模型、车队最优长度等问题展开了热烈讨论,气氛十分活跃。



报告人简介
Prof Ronghui Liu, Professor of Networks and Transport Operations, at the Institute for Transport Studies (ITS), University of Leeds, UK. She received her BSc from Peking University and PhD from Cambridge University. Before joining ITS Leeds, she was a Research Fellow at University College London, and while at ITS, she was seconded to head the Transport Modelling Division at TRL, UK in 2005. She served as an Associate Editor for journal IEEE Transaction on Intelligent Transportation Systems, and Member of Editorial Board of IET Journal of Intelligent Transport. Her research areas span a number of themes in the field of transport studies: in vehicle dynamics and traffic micro simulation model developments; in traffic control theory and algorithms; in travel behavior and Intelligent mobility; in stochastic models and reliability analysis; in public transport operations and controls; in timetabling and schedule coordination; and in train control and railway traffic management systems. She is particularly interested in the interrelationships between these themes, and methodologies for estimation, design and evaluation of their network-wide effects.
(撰稿/摄影:杨珺)